Robopoly
Nos membres, étudiants de l’EPFL ou d’autres écoles de la région lausannoise, ont accès à un atelier comportant nombreux outils, machines et composants leur permettant de réaliser divers projets d’électronique, mécanique ou robotique, encadrés et conseillés par des étudiants du comité désireux de partager leurs connaissances. Les infrastructures de Robopoly sont uniques : ce sont les seules de l’EPFL où l’on y voit se côtoyer makers débutants et expérimentés, pour des projets personnels ou académiques.

Qui sommes-nous?
L’aventure vous tente ? Comment devenir membre ? Qui est derrière tout ceci ?
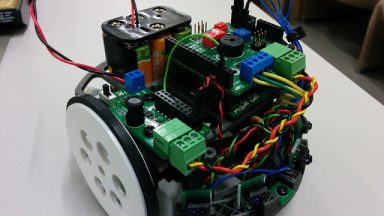
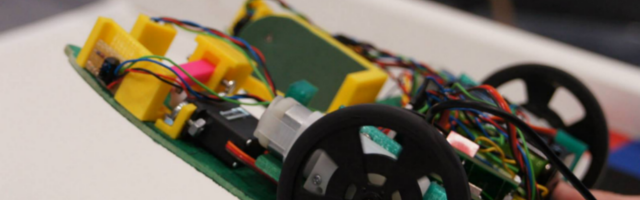
Kit PRisme
Pour s’initier à la robotique en partant de zéro, Robopoly propose un kit permettant de monter un robot autonome et modulable, le PRisme. Cette plateforme robotique, développée par l’association, est le cadre idéal pour débuter et s’épanouir, sa polyvalence permettant une rapide progression vers des projets plus avancés.

Démos
Ces présentations, données par le comité durant la période académique, introduisent différents concepts d’électronique, informatique, mécanique ou robotique. Accessibles et pédagogiques, elles sont là pour accompagner le montage et la prise en main des différents kits que nous offrons.


Introduction to 3D printing
Lieu et salle: CM 1 5
Catégorie: Conférences – Séminaires

Introduction à l'electronique pratique
Lieu et salle: CM 1 5
Catégorie: Conférences – Séminaires




Contact
Pour t’inscrire n’hésite pas à venir à la permanence tous les lundi soirs 18:00 – 20:00.
+41 (0) 21 693 77 49
AGEPoly – Robopoly – EPFL
BM9139 Station 17
1015 Lausanne
Switzerland

